Point Cloud Diffusion
Given the noisy speckles they contain, LiDAR scans seem like a great candidate for seeding a diffusion process. Here we take a scan and run it through Houdini in order to add some lighting, colorize the points, and fly a camera through the scene.
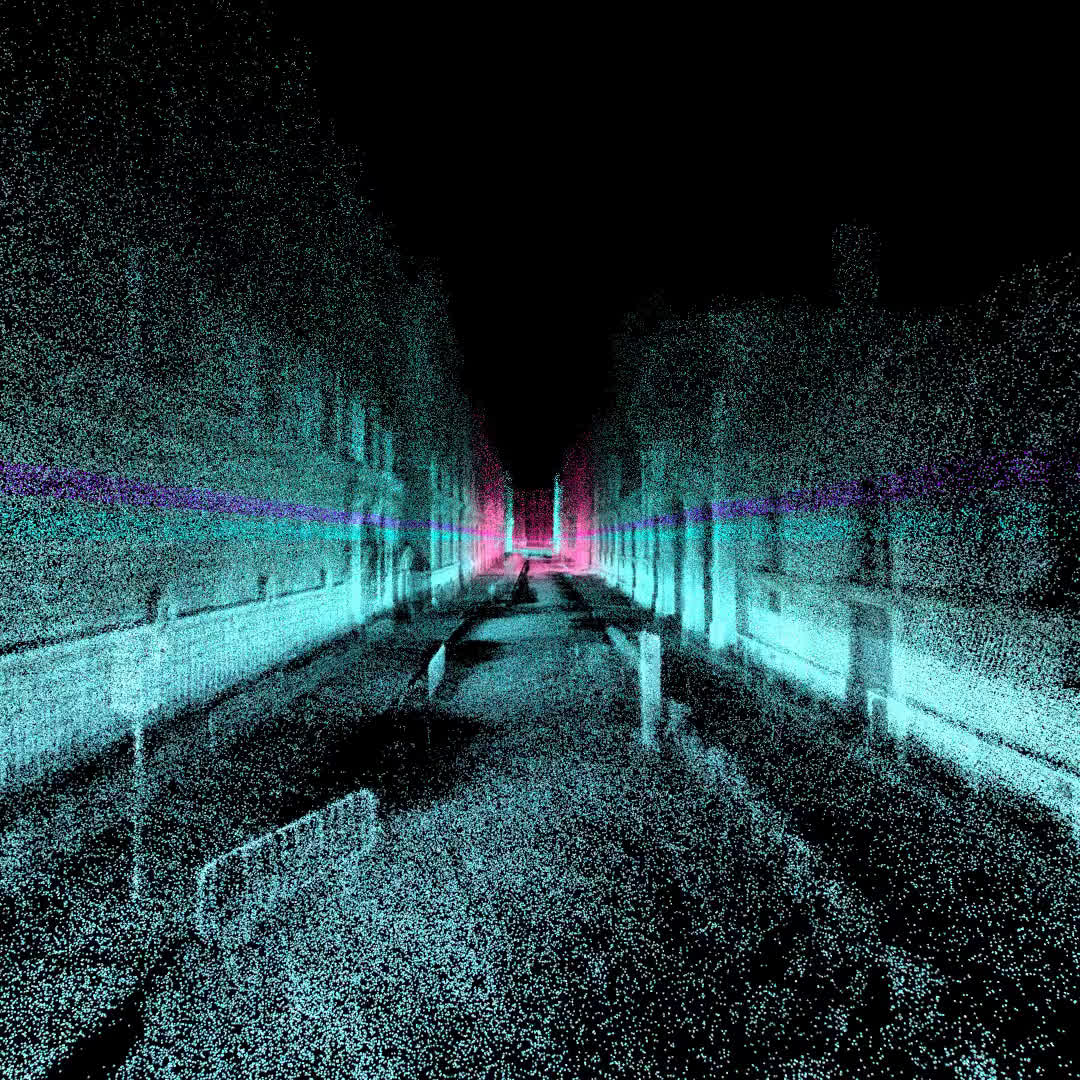
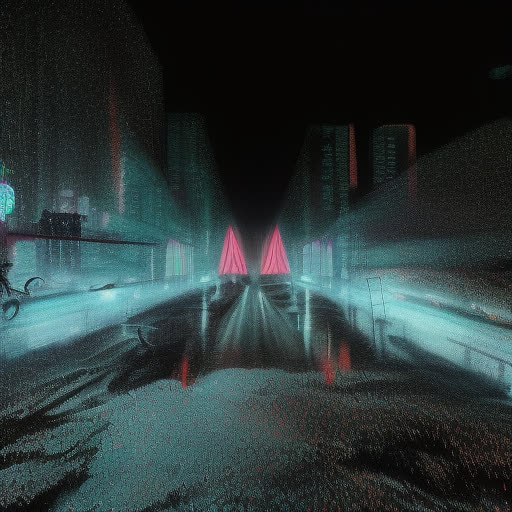
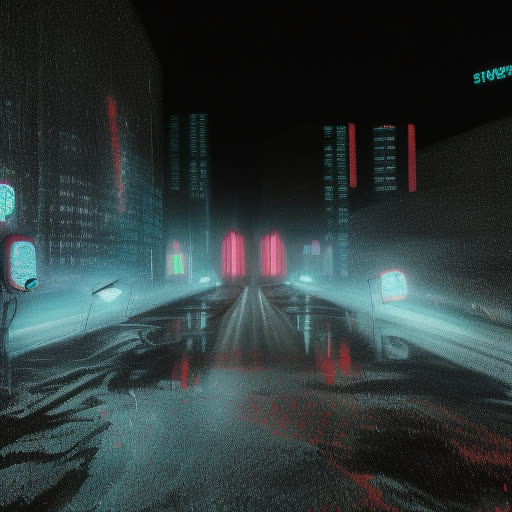
Running this through stable-diffusion-v1-5 with a start_schedule=0.5, we get the following.
To make this a bit more fun, we apply the same modulo tricks to the start_schedule parameter as done in the Advection Diffusion project. This causes the amount of randomness added to our image to fluctuate to a rhythm.

For completeness we also negate the point cloud.
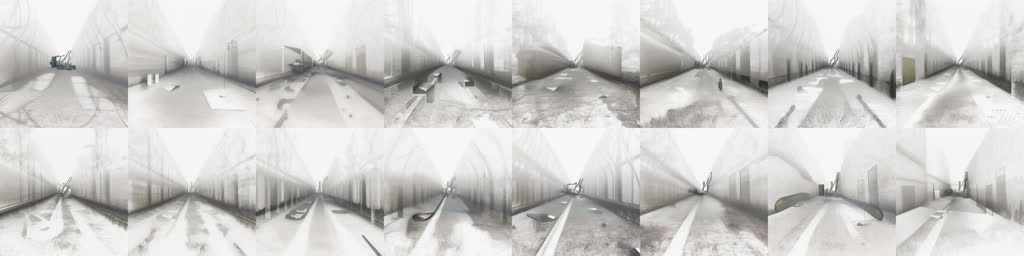

The resulting images have an interesting quality, being a blend of negative and positive. What should be dark splotches and shadows turn out light, but some of the more hallucinated objects are rendered correctly as in a positive. Sounds like something to explore further with photographic images!
The output is just begging for some electro jams, so here we go.